Vikas Shetty
Permanent Magnet DC Motor (PMDC) 2 DOF Current Controller Design
The torque control of PMDC motors is typically performed indirectly through current regulation using current measurements. In most cases, the current tracking is done through standard proportional-integral (PI) controllers which act on the current error. However, the dynamic performance of a such system is found to be not satisfactory. To counter this the company had proposed a general two-degree of freedom (2DOF) feedback current control architecture consisting of independent compensators for commanded and measured currents. Additionally, an observer-based disturbance compensation term was also added, allowing the system to be configured into different response characteristics (Current Tracking, Disturbance Rejection, and Noise Transmission).
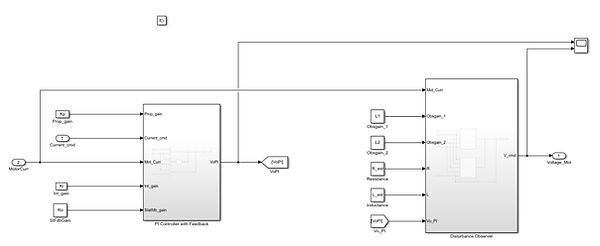
I was tasked with replicating this proposed control architecture and validating the design. For which I did the initial analytical modeling in MATLAB using the System Combined Transfer Function and later modeled the Controller and Motor Plant in SIMULINK as shown below.
To maintain confidentiality I have only shown blocks after replicating same in my personal system and a few representative plots

The tracking performance and the Bode plots of the system is shown below


